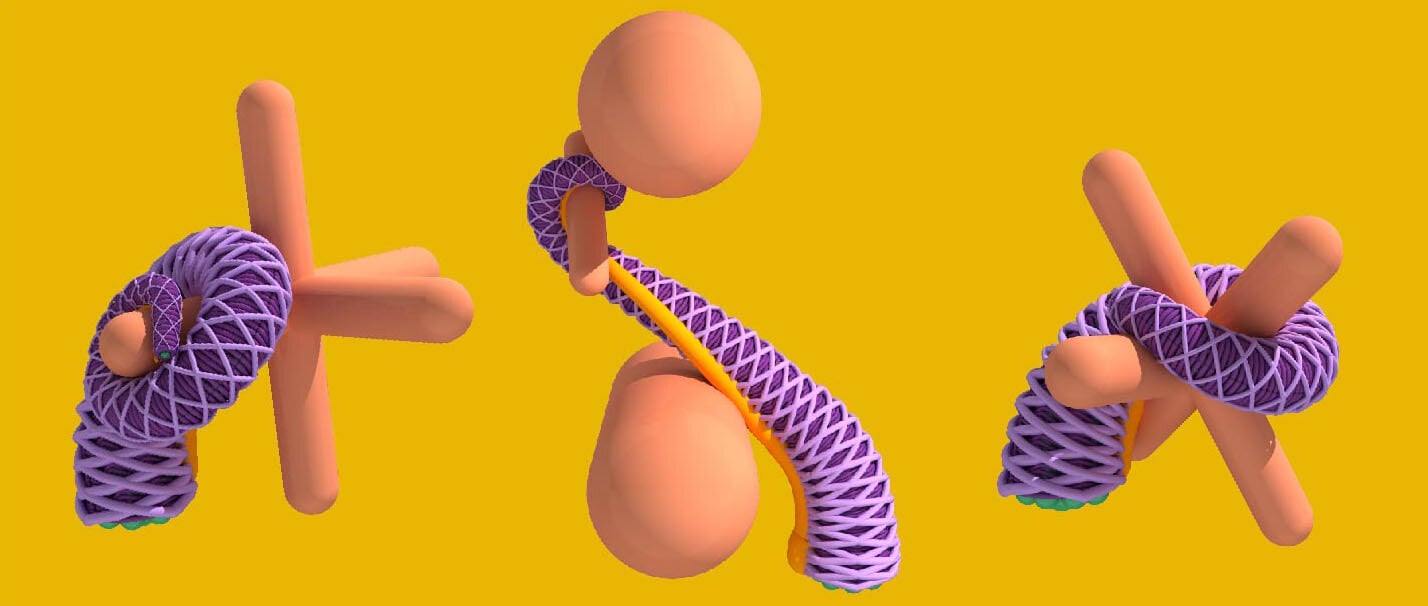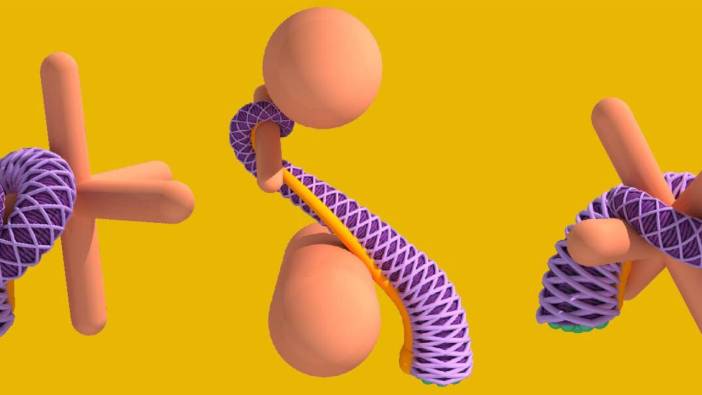
Illinois Üniversitesi’nden bir araştırma ekibi, "Topology, dynamics, and control of a muscle-architected soft arm" başlıklı çalışmasında, ahtapot kolunun kas yapısını detaylı bir hesaplama modeliyle inceledi. Bu model, kolun karmaşık hareketlerini, basit kas kasılmalarıyla kontrol etmeyi mümkün kılan yapısal mekaniği açıklıyor. Araştırmacılar, bu modeli robotik sistemlerde kullanarak "cyberoctopus" (robotik ahtapot) projelerini geliştirmeyi hedefliyor.
Ahtapotların beyinleri, vücutlarının her kolunda bağımsız olarak çalışabilen, merkezi olmayan bir yapıya sahip. Bu özellik, ahtapotların inanılmaz hareket kabiliyetlerine olanak tanıyor, ancak bu da hesaplama açısından son derece karmaşık bir sistem yaratıyor. "Bu çalışmanın amacı, çok sayıda serbestlik derecesine sahip bir sistemi nasıl kontrol edebileceğimizi çözmek," diyor çalışma ekibinden Mattia Gazzola.
Araştırmacılar, 2019’dan beri bu projede birlikte çalışarak, neredeyse 200 kas grubunun birleştirildiği gerçekçi bir kol simülasyonu geliştirdi. Canlı bir ahtapotun hareketlerini takip etmek için kullanılan görüntüleme teknikleri, kolun karmaşık hareketlerinin simülasyonlarda başarılı bir şekilde tekrar edilmesini sağladı.
Bu hesaplama modeli, biyoloji ve mühendislik alanlarında bir dönüm noktası olma potansiyeline sahip. Ayrıca, robot mühendisleri için bir test ortamı sağlayarak yeni algoritmalar geliştirmelerine yardımcı olabilir. Ekip, bu teorik anlayışlarını bir robot prototipiyle test etmek ve ahtapotun sekiz kolunu bir arada çalıştırarak daha ileri düzey görevler gerçekleştirmesini sağlamak istiyor.